歩行ロボット昆虫編の2時間目です。
1時間目は4足歩行でした。
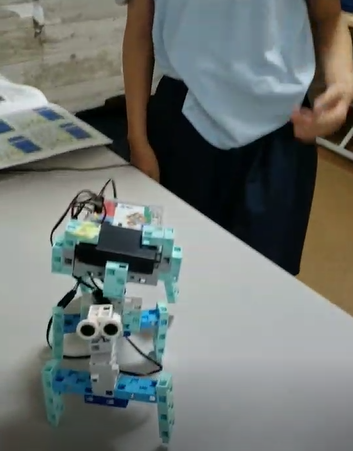
今日は、昆虫のアリの動きを学習してから、
6足歩行のロボットを作りました。
2本ずつ同時に動かすため、サーボモーター3つで制御できます。
4足のプログラムを改修して作成します。
4足の時よりもむずかしいですが、 3人とも、うまくできたようです(^_-)-☆
2足、4足、6足とだんだん足の数が増えてきました(笑)
でも、来月は4足に戻ります。
足を1本ずつ動かすので、もっとむずかしくなります。
![]()
名古屋市のロボットプログラミング教室「考ラボ」

- お知らせ一覧
- 6足歩行ロボット(御器所校・木曜日)
6足歩行ロボット(御器所校・木曜日)