



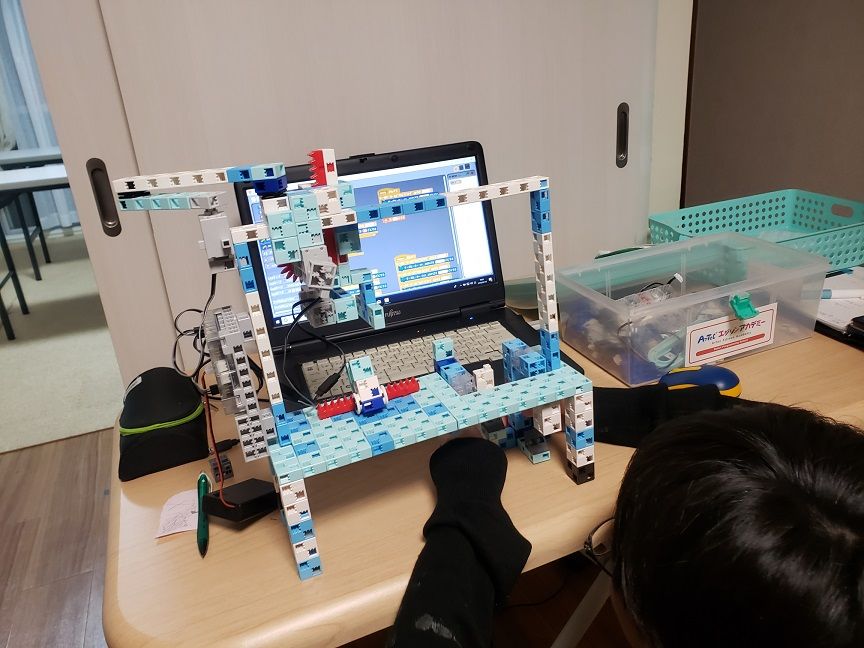
サーボモーター3つ使います。
今までならったギアとラックギアの組み合わせも使います。
タッチセンサーで操作します。
だんだんむずかしくなってきました。
まず、組み立てがたいへん!!
組み立てが得意なKくん、がんばりました!
そしてプログラム。
1.電源をいれると、アームがはじめの位置に移動する。
2.プレイヤーがタッチセンサーのボタンを押している間はアームが左に移動し、ボタンをはなすと止まる。
3.アームが下がって、景品をつかんで持ち上げる。
4.アームが右に移動して、つかんだ景品をはなす。
5.アームがはじめの位置にもどる。
これだけを、それぞれ関数にします。
さあ、たいへん!
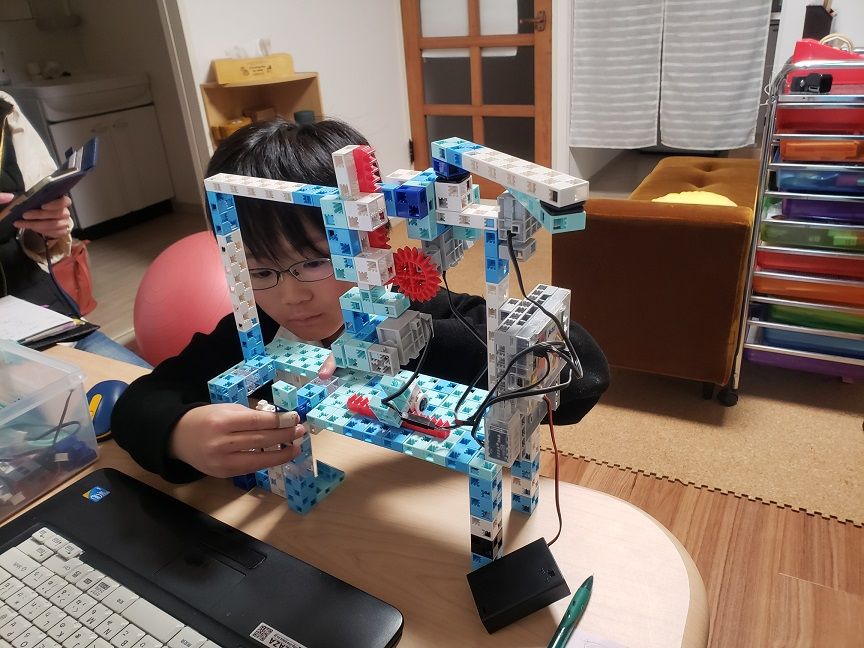
Kくん、がんばってできました!
うまく動いたね!
さらにKくんは、マシンの高さを改造して高くしました。


