2足歩行ロボットが終わって、
4足歩行と6足歩行に入ったKくんです。
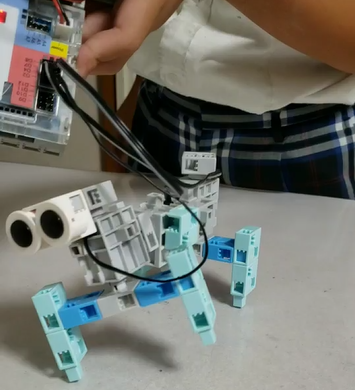
まず、4足歩行の動物の歩き方を学んでから、
サーボモーター3つで4足歩行ロボットを作りました。
片足ずつあげながら、じょうずに歩いています!(^^)!
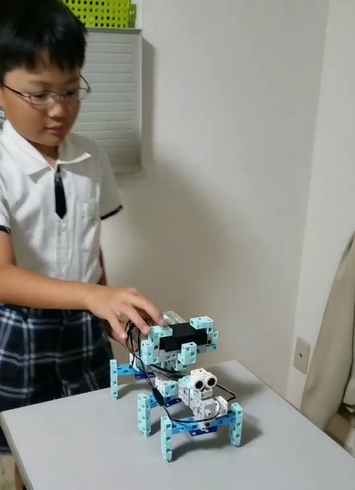
次に昆虫のアリの歩き方を学んでから、
サーボモーター5つ使って
6足歩行ロボットを作りました。
Kくん、よく動きを確認して、プログラミングして、
6足もじょうずにできました!
![]()
名古屋市のロボットプログラミング教室「考ラボ」

- お知らせ一覧
- 4足歩行・6足歩行ロボット
4足歩行・6足歩行ロボット