





入会後約1年が経ったTくん、加速度センサーを使うレベル4になりました。
加速度センサーの仕組みをまず学びました。X軸、Y軸、Z軸の3軸があります。
今月はZ軸は使わず、X軸、Y軸の2つを使い、前後と左右の動きを制御します。
加速度センサーの仕組みをまず学びました。X軸、Y軸、Z軸の3軸があります。
今月はZ軸は使わず、X軸、Y軸の2つを使い、前後と左右の動きを制御します。
テストモードにして、加速度センサーを前後左右に傾けたときのそれぞれの値を
調べます。それから、前と後ろの中間値(しきい値)と、左右のしきい値を
調べます。そして、その数字でプログラミングします。
調べます。それから、前と後ろの中間値(しきい値)と、左右のしきい値を
調べます。そして、その数字でプログラミングします。
Tくんよく考えて、プログラミングできました。
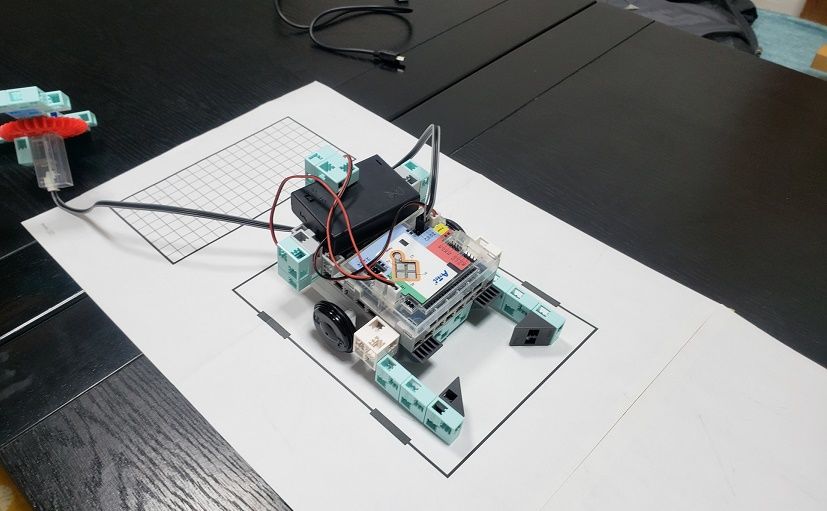
完成したら、まず距離を少しおいて並べたブロックの間をぬって、
うまく自動車が走れるかどうか確認します。
思い通りに操作できるか、できなければ、操作方法が違うのか
プログラミングが違うのか考えて修正します。
それからブロックを集める対戦です。Tくんは1人のため、先生と対戦です。
1度入ったブロックが出にくいように、Tくん形に工夫しました。
白ブロックはプラス1点、黒ブロックはマイナス1点です。
賢いTくん、最後にすばやく黒ブロックを相手側に押し込みました!
Tくんの作戦勝ちでしたヽ(^o^)丿 まいった!
白ブロックはプラス1点、黒ブロックはマイナス1点です。
賢いTくん、最後にすばやく黒ブロックを相手側に押し込みました!
Tくんの作戦勝ちでしたヽ(^o^)丿 まいった!
動画です。
動画を撮影する先生と対戦したため、対戦の動画はありません。


