




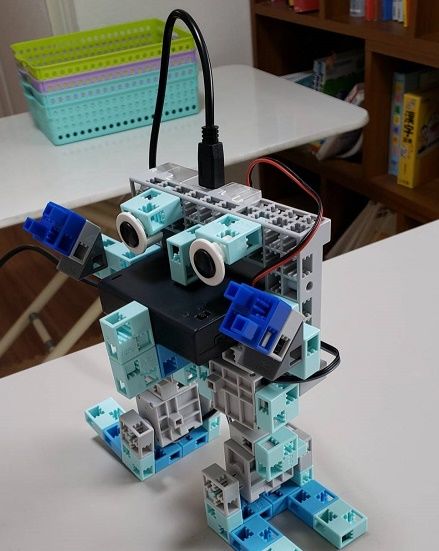
入会後約1年経ったTくんは、歩行ロボットへ入りました。
まず、サーボモーター4つ使った2足歩行です。
歩くという足の動きを分析して、
1動作ずつプログラミングしていきます。
片足を上げるには、上げた足を前に出すのには、
その足をおろすのには、それぞれどのサーボモーターを
何度にしたらいいのか、考えないといけません。
最初はみんなあまりうまくいきません。
Tくんも、最初は前にちゃんと進まなかったね。
何度もプログラムを修正して、少しずつよくなったね。
まず、サーボモーター4つ使った2足歩行です。
歩くという足の動きを分析して、
1動作ずつプログラミングしていきます。
片足を上げるには、上げた足を前に出すのには、
その足をおろすのには、それぞれどのサーボモーターを
何度にしたらいいのか、考えないといけません。
最初はみんなあまりうまくいきません。
Tくんも、最初は前にちゃんと進まなかったね。
何度もプログラムを修正して、少しずつよくなったね。
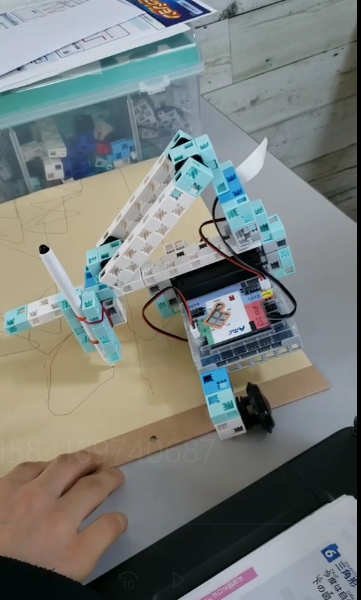
Sくんは、お絵かきロボットです。
これは、DCモーターとサーボモーター両方使います。
DCモーターは横への動きに使います。
サーボモーターは、ペンの動きに使います。
指定通りの絵を描くには、微調整が必要です。
Sくん、よく考えて、だんだんちゃんと描けるようになりました。


