



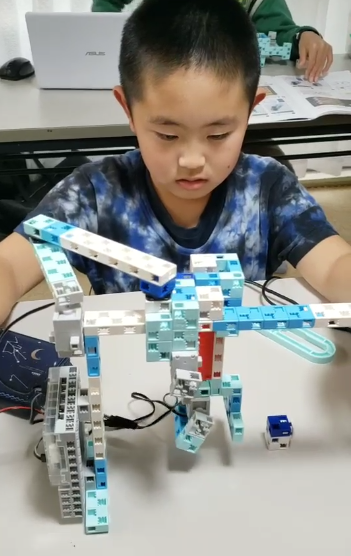

Tくんはクレーンゲーム機です。
サーボモーター3つ使います。
ギアとラックギアの組み合わせも使います。
タッチセンサーで操作します。
だんだんむずかしくなってきました。
組立も複雑です。
そしてプログラム。
1.電源を入れると、アームがはじめの位置に移動する
2.プレイヤーがタッチセンサーのボタンを押している間はアームが左に移動し、ボタンをはなすと止まる。
3.アームが下がって、景品をつかんで持ち上げる。
4.アームが右に移動して、つかんだ景品をはなす。
5.アームがはじめの位置にもどる。
これだけを、それぞれ関数にします。
Tくん、じょうずにできました!
サーボモーター3つ使います。
ギアとラックギアの組み合わせも使います。
タッチセンサーで操作します。
だんだんむずかしくなってきました。
組立も複雑です。
そしてプログラム。
1.電源を入れると、アームがはじめの位置に移動する
2.プレイヤーがタッチセンサーのボタンを押している間はアームが左に移動し、ボタンをはなすと止まる。
3.アームが下がって、景品をつかんで持ち上げる。
4.アームが右に移動して、つかんだ景品をはなす。
5.アームがはじめの位置にもどる。
これだけを、それぞれ関数にします。
Tくん、じょうずにできました!
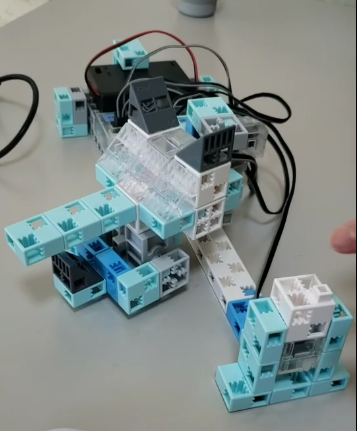
Yさんは、かみつき番犬ゲームです。
初めて確率の考え方を学びます。
「何回ゲームをすると、平均で何回当たる」というものです。
光センサーの上に、ブロックを置いたりとったりを繰り返して、
その回数をカウントして、何回かに1回、ロボットが向きを変えて
噛みつくというプログラムです。
初めて確率の考え方を学びます。
「何回ゲームをすると、平均で何回当たる」というものです。
光センサーの上に、ブロックを置いたりとったりを繰り返して、
その回数をカウントして、何回かに1回、ロボットが向きを変えて
噛みつくというプログラムです。
確率のプログラムもサーボモーターの動きも細かいプログラムですが、
Yさんよくできました!
Yさんよくできました!
自考力コースのHくん、プログラムの自動車の制御です。
まっすぐ走ったり、右へ曲がったり、左へ曲がったりしながら、
コースを走ります。ブロックにぶつからないように
上手に道を走らせることができるかな?
コースを走ります。ブロックにぶつからないように
上手に道を走らせることができるかな?


