




まもなく入会後1年のTくん、
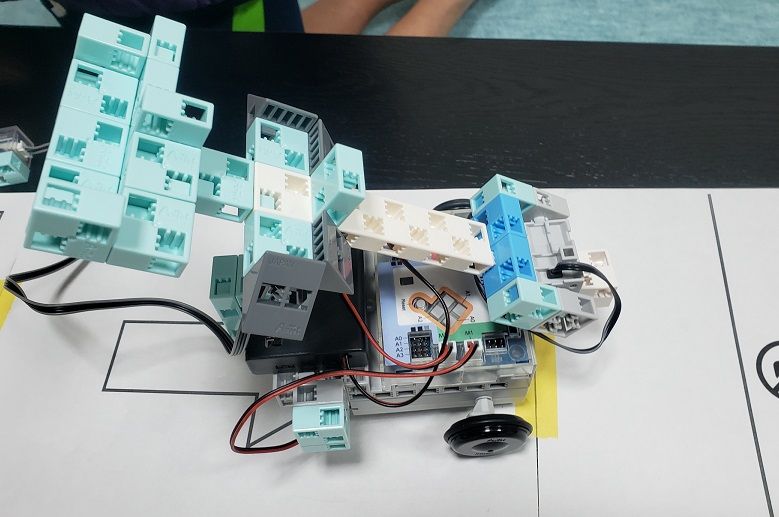
3月は、まずブロックをトラックの荷台へ運ぶプログラムでした。
ブロックをつかんだ後グルっと回転して、荷台でブロックを離します。
ブロックがうまくつかめなかったりしましたが、
なんとかできました!
3月は、まずブロックをトラックの荷台へ運ぶプログラムでした。
ブロックをつかんだ後グルっと回転して、荷台でブロックを離します。
ブロックがうまくつかめなかったりしましたが、
なんとかできました!
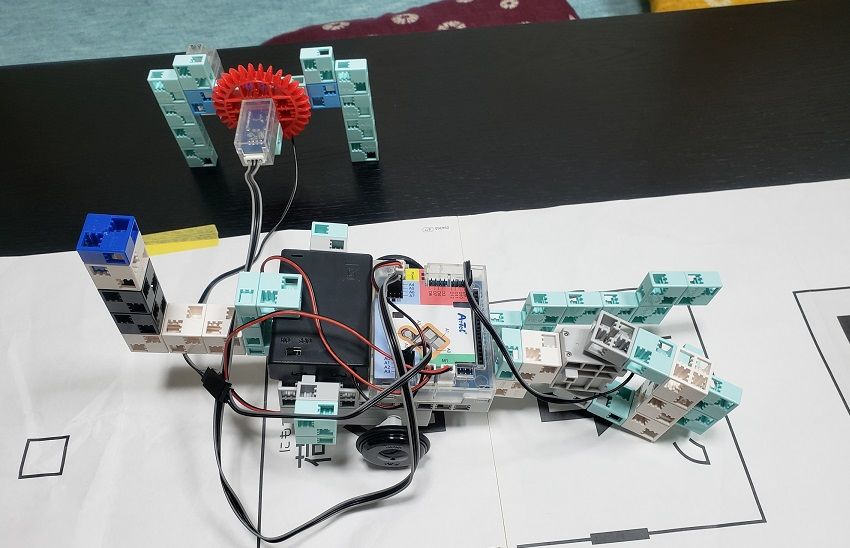
次にカブトムシ型のビートルロボットです。
加速度センサーのZ軸を使います。
「ふる」のと「かたむける」のとの違いを数値化します。
この数値までは「かたむける」
この数値より大きいときは「ふる」というように
プログラミングします。
ふったときに、ビートルの角が急激に下がって、
相手のタッチセンサーに触り、相手のLEDを点灯させたら勝ちです。
加速度センサーのZ軸を使います。
「ふる」のと「かたむける」のとの違いを数値化します。
この数値までは「かたむける」
この数値より大きいときは「ふる」というように
プログラミングします。
ふったときに、ビートルの角が急激に下がって、
相手のタッチセンサーに触り、相手のLEDを点灯させたら勝ちです。
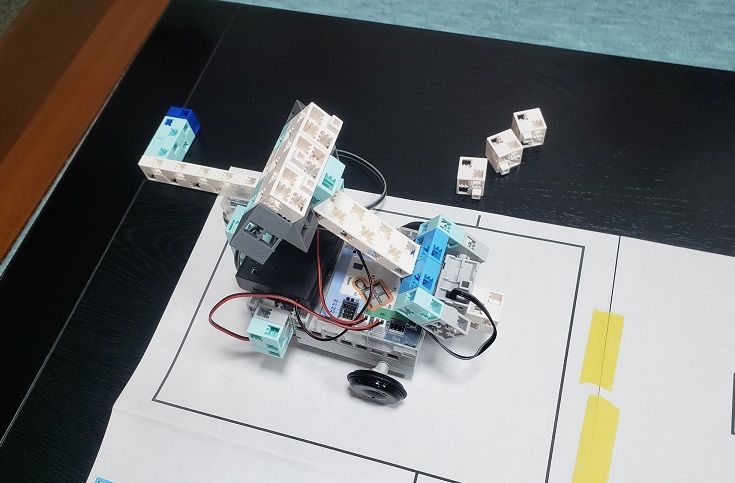
それからビートルロボットを改造して、9本のブロックの的を
倒すようにしました。
Tくん、何回も改造したり、プログラミング変更したりして、
最強のマシンにしました!
倒すようにしました。
Tくん、何回も改造したり、プログラミング変更したりして、
最強のマシンにしました!


