




カップめんタイマーを作成する前に、
まず基礎として、ロータリーエンコーダの仕組みを学びます。
ロータリエンコーダとは、回転数・回転角度・回転位置を計測する
センサーのことです。
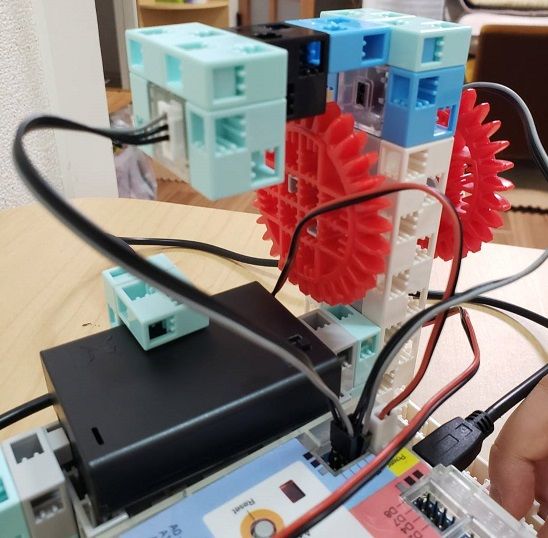
ロータリーエンコーダは、
赤外線フォトインタラプタとギアとを組み合わせて作成します。
赤外線フォトインタラプタは、2つの赤外線フォトリフレクタを
向かい合わせにして、作成しました。先月学びました。
今月もそれを使います。
赤外線フォトインタラプタにギアを組み合わせて、
ギアが回転している間に、赤外線が届いているかいないかを
赤外線フォトインタラプタの値で検知します。
そして、届いているとき、回転量を6度と計測し
届いていないときも、回転量を6度と計測します。
そして、回転量が360度になったところで
DCモーターの停止命令を出すプログラムにします。
赤外線フォトインタラプタのしきい値がきちんとしていないと、
正確に赤外線が届いているかどうか判断ができません。
ピッタリ360度でDCモーターを止めることができるでしょうか?
Yさん、ぴったりでした\(^o^)/


