



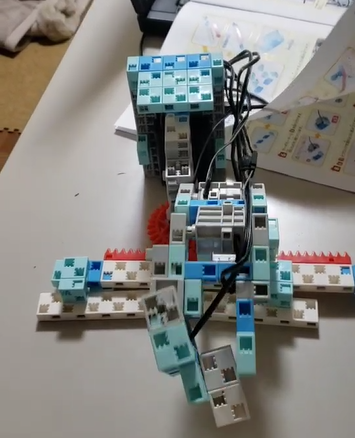
まもなく2年間のコースを終了する2人は、スキャン機能付きアームロボットです。
これまでに学習してきた要素を組み合わせてロボットを作ります。
1.赤外線フォトレフレクターをつかって見つけたブロックを
アームロボットで運ぶ仕組み。
2.変数を使って、サーボモーターを1度ずつ角度を変えて制御する方法。
3.2種類のギアを組み合わせて、回転運動を直線運動に変える仕組み。
4.リストをつかって、複数の情報をまとめて記録する方法。
今回はセンサーを移動させて、少ない数のセンサーで広い範囲を調べる
方法も学びます。サーボモーターを4つ使います。
ロボットを移動させ、ブロックをつかみ、後ろの台に載せます。
Rくんは、最初ブロックをつかみ損ねましたが、次にはちゃんとできました!
Tくんも、じょうずにできました\(^o^)/
2人は、来月は最後の8軸2足歩行ロボットです。
人の足の動きと同じような動きをさせて、
レバルアップミッションではサッカーをします。
楽しみですね!(^^)!
2人ともそのあとは、3年目のエキスパートコースへ入ります\(^o^)/
動画です。6人分いっしょです。


