



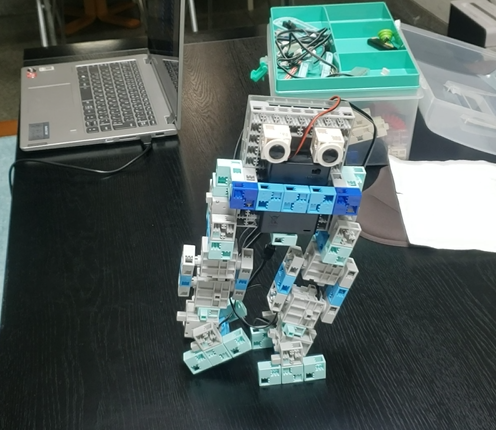
2年間の最後、8軸の2足歩行ロボットです。
片方の足に4つずつのサーボモーターを使って、
人間の足に近い動きをさせます。
片方の足に4つずつのサーボモーターを使って、
人間の足に近い動きをさせます。
足の付け根の関節の部分にサーボモーター1つ、
ひざの関節部分にサーボモーター2つ、
足首の部分にサーボモーター1つ
ひざの関節部分にサーボモーター2つ、
足首の部分にサーボモーター1つ
まず、普通に2足歩行します。
足が長くなっているので、倒れないように歩くのがたいへんです。
SくんもTくんも上手に調整できました\(^o^)/。
足が長くなっているので、倒れないように歩くのがたいへんです。
SくんもTくんも上手に調整できました\(^o^)/。
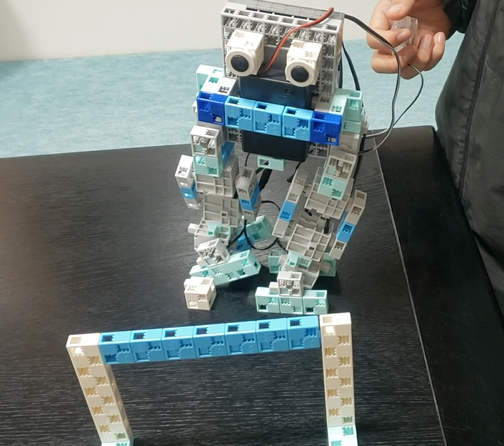
レベルアップミッションでは、サッカーの動きをさせます。
ドリブルでボールを持って行ってシュートします。
ドリブルでボールを持って行ってシュートします。
2人とも、ゆっくりのドリブルで、シュートはすばやくできました!
ゴールに入らない時もありましたが(笑)
この調整は、単に歩く時よりもさらにたいへんです。
ドリブルはまっすぐにいきません。
実際のサッカーでもそうですから、リアルでいいかもしれません(笑)
ゴールに入らない時もありましたが(笑)
この調整は、単に歩く時よりもさらにたいへんです。
ドリブルはまっすぐにいきません。
実際のサッカーでもそうですから、リアルでいいかもしれません(笑)
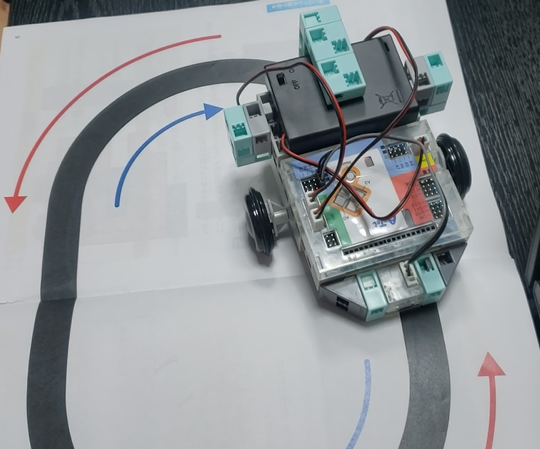
レベル3のKくんは、レベル3の最後、ライントレース自動車です。
赤外線フォトレフレクターを使って黒色と白色を識別して、
黒いランンに沿って自動車を走らせます。
最初はただ走るだけですが、次に、もう一つ赤外線フォトレフレクターを
つけて、停止線で止まるようにしました。一旦止まったあと、また
走り出します。
レベルアップミッションでは、白い壁に沿って自動車を走らせます。
Kくん、うまくできました\(^o^)/


