



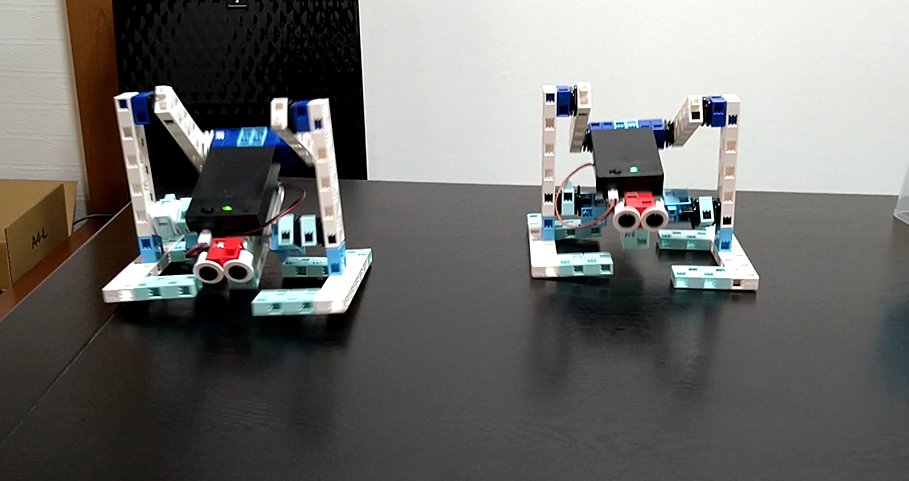
Hくん、今月のロボットは、2足歩行ロボットでした。
モーターは1つで、回転軸をたくさん使いました。
組み立てがむずかしかったです。
モーターの回転パーツと足を持ち上げる部分のブロックとの
つなぎの部分がとくにわかりにくかったです。
組み立てがむずかしかったです。
モーターの回転パーツと足を持ち上げる部分のブロックとの
つなぎの部分がとくにわかりにくかったです。
最初、先生がつなぎかたを間違えて、
足がもちあがらなかったね('ω')
もちあがらないと、歩けません(笑)
Hくんがテキストをよくみてなおしてくれましたヽ(^。^)ノ
足がもちあがらなかったね('ω')
もちあがらないと、歩けません(笑)
Hくんがテキストをよくみてなおしてくれましたヽ(^。^)ノ
Hくんは、つなぎ部分のブロックを増やして、
はやく歩けように工夫しました\(^o^)/
はやく歩けように工夫しました\(^o^)/
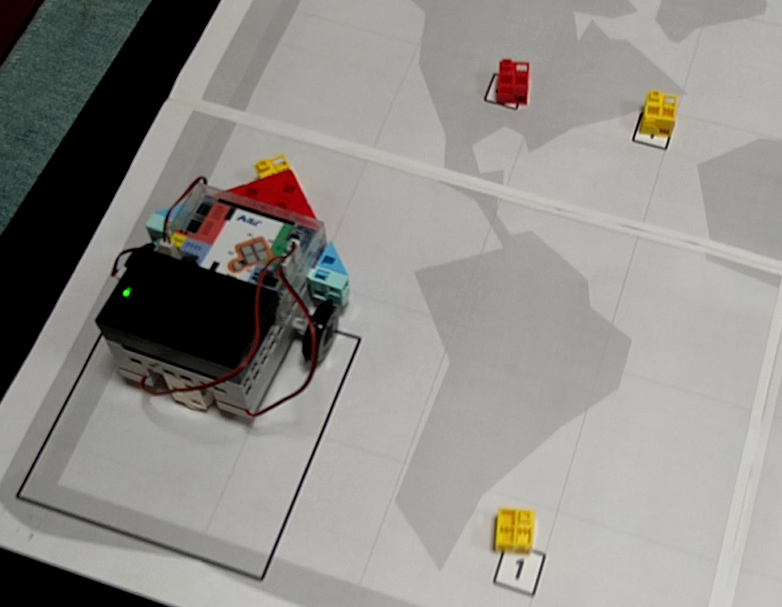
プログラミングは、おたからあつめでした。
自動車の先端を三角にして、世界地図上にちらばった
ブロックをおたからにみたてて、進んでいきます。
黄色のブロックを動かしたら1点、
水色のブロックを動かしたら2点、
赤色のブロックはおたからではなくゴミです。
動かすと、マイナス1点になってしまいます。
満点は10点で、Hくんは8点とれましたヽ(^。^)ノ
ブロックをおたからにみたてて、進んでいきます。
黄色のブロックを動かしたら1点、
水色のブロックを動かしたら2点、
赤色のブロックはおたからではなくゴミです。
動かすと、マイナス1点になってしまいます。
満点は10点で、Hくんは8点とれましたヽ(^。^)ノ


