



Iくんは、レベル4-1自動車コントローラーでした。
レベル4では、初めて加速度センサーを使います。
加速度センサーは、傾けるとX軸・Y軸・Z軸の値が変わります。
今回は、Z軸は使わず、X軸とY軸を使いました。
レベル4では、初めて加速度センサーを使います。
加速度センサーは、傾けるとX軸・Y軸・Z軸の値が変わります。
今回は、Z軸は使わず、X軸とY軸を使いました。
テストモードにして、
前・後・左・右に傾けたときの、それぞれのX軸Y軸の値を調べます。
そして、傾けない時の値とそれぞれに傾けたときの値との中間値をとります。
その中間値よりも大きいあるいは小さいときは、前・後に車が動くようにする、
また、左や右に曲がるようにするというように、プログラミングします。
前・後・左・右に傾けたときの、それぞれのX軸Y軸の値を調べます。
そして、傾けない時の値とそれぞれに傾けたときの値との中間値をとります。
その中間値よりも大きいあるいは小さいときは、前・後に車が動くようにする、
また、左や右に曲がるようにするというように、プログラミングします。
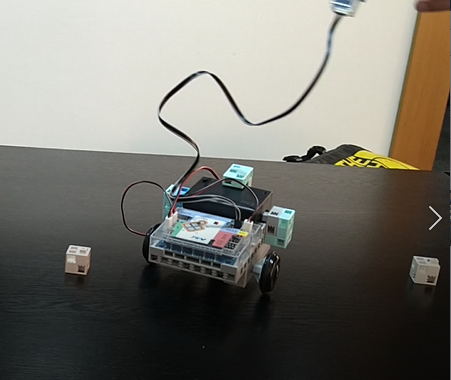
加速度センサーをコントローラーにつけて操縦しやすくしました。
Iくん、ゆっくりじょうずに操縦して、
置いたブロックの間を走らせましたヽ(^。^)ノ
Iくん、ゆっくりじょうずに操縦して、
置いたブロックの間を走らせましたヽ(^。^)ノ
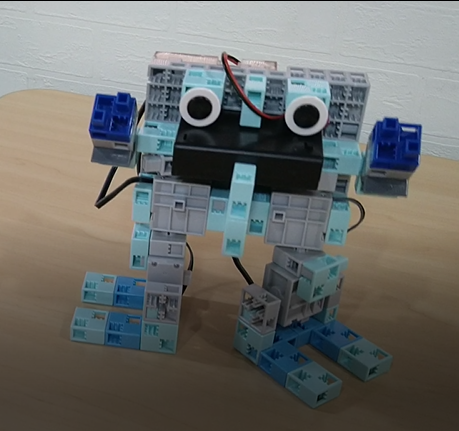
Yくんは、レベル6-1 2足歩行ロボットでした。
歩行ロボットは、まず歩く動きを考えます。
歩行ロボットは、まず歩く動きを考えます。
1.まっすぐ立つ
2.足をあげる
3.前に出す
4.おろす
この動作を左右交互に繰り返します。
2.足をあげる
3.前に出す
4.おろす
この動作を左右交互に繰り返します。
つぎに、この4つの動作の角度を考え、サーボモーターのプログラミングをします。
最初はなかなかみんなうまく歩きません。
前にすすまなかったり、バランスをくずして倒れたりします。
Yくんも最初は、うまく前に進みませんでしたが、
改良してできるようになりました\(^o^)/
発展課題の後ろ向きに歩くのもできました\(^o^)/


