



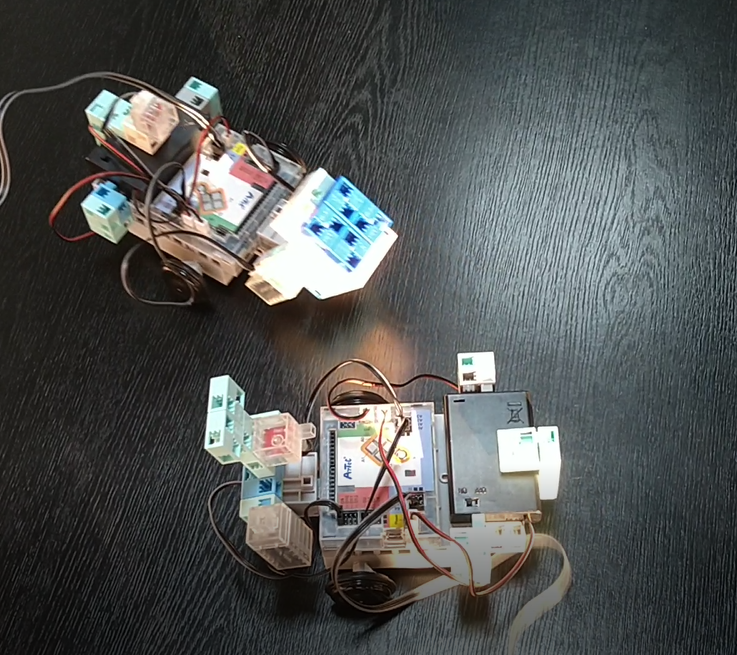
Iくんは、ビートル型のロボットです。
今月は加速度センサーのZ軸も使います。
まず加速度センサーのX軸、Y軸、Z軸それぞれの値をとって
閾値を求めます。
X軸はとY軸は左右と前後にかたむけたとき、
Z軸は上下にふったときです。
Iくん、しきい値をきちんととってプログラミングしました。
修正しなくてもちゃんと動きました\(^o^)/
相手のタッチセンサーを押して相手のLEDをつけた方が勝ちです。
Iくんは相手にタッチセンサーをおされにくいように、
角の形を工夫しました。
テキストとおりのビートルと対戦しました。
お互いになかなか相手のタッチセンサーをおせませんでした。
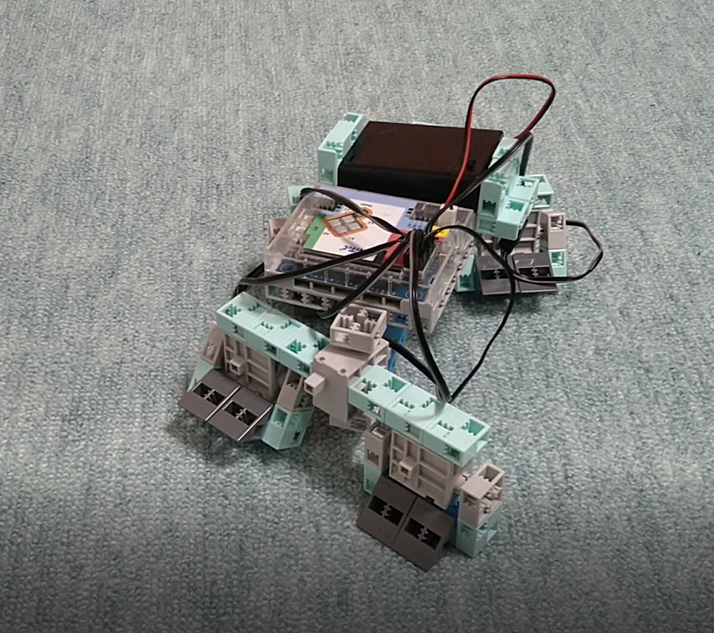
Yくんは、歩行ロボット(昆虫編)のレベルアップミッション
ワニワニロボットです。
レベルアップミッションはプログラミングの解答ありませんが、
Yくんちゃんとプログラミングできました\(^o^)/
かわいく歩いています。
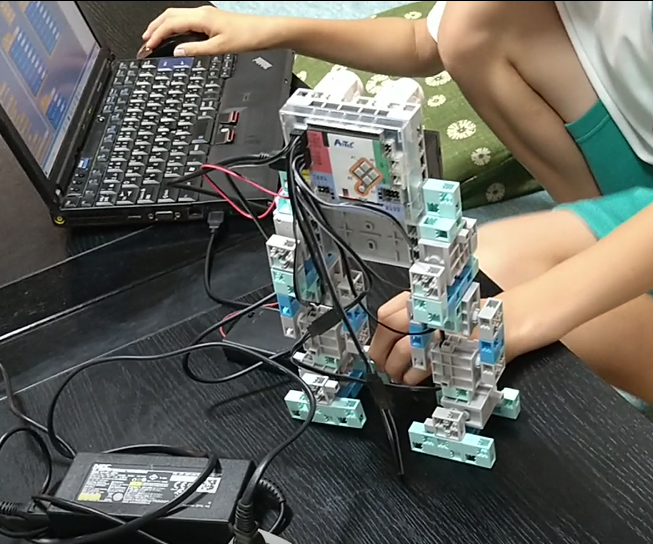
Kくんは2年間コース最後の8軸2足歩行ロボットです。
片足で4つずつのサーボモーターをつかうため、足が長くて
不安定で、たおれないように歩くようにするのがたいへんです。
現在調整中です。


