



Hくん、今月のロボットはモノレールです。
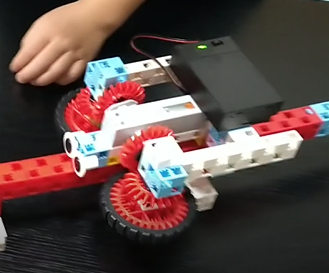
モーターの回転じくにギアをつけます。
そのギアに垂直になるように、もう一つギアをつけます。
さらにそのギアの下にタイヤをつけた大きいギアをつけます。
そのギアに垂直になるように、もう一つギアをつけます。
さらにそのギアの下にタイヤをつけた大きいギアをつけます。
モーターが前向きに回転すると、
垂直につけたギアは右回りにまわります。
タイヤのついた大きいギアも右回りにまわります。
モノレールのレールをタイヤに密着しておくと、
自分を押し出すようにして、前に進みます。
垂直につけたギアは右回りにまわります。
タイヤのついた大きいギアも右回りにまわります。
モノレールのレールをタイヤに密着しておくと、
自分を押し出すようにして、前に進みます。
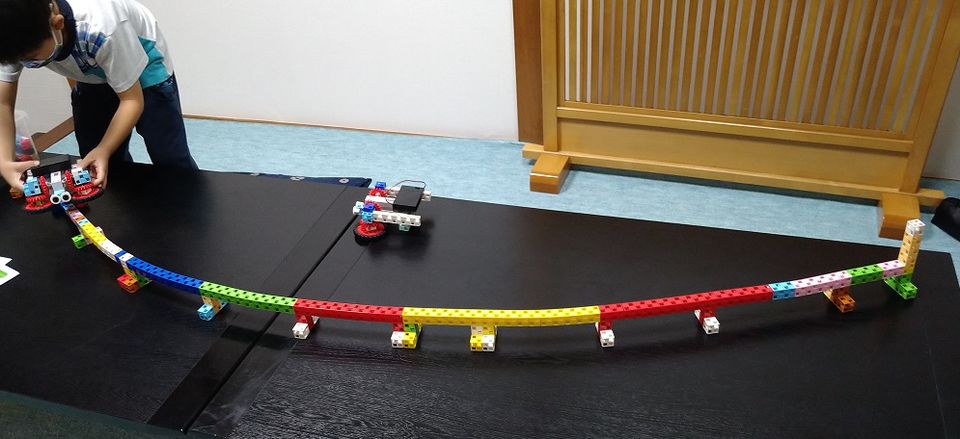
Hくん、テキストではブロック10個のレール2本だけでしたが、
レールをなが~くしました。長くして、少しカーブさせました。
モノレールらしいです!
レールをなが~くしました。長くして、少しカーブさせました。
モノレールらしいです!
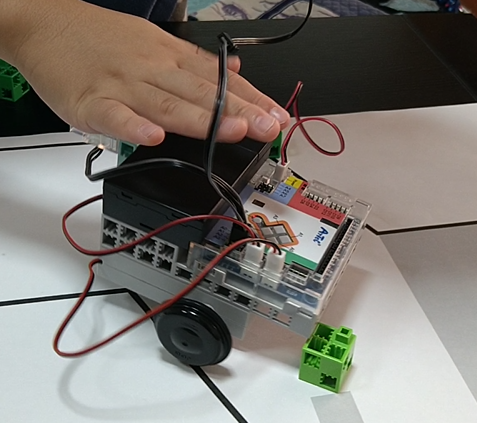
プログラミングは、先月同様に赤外線フォトレフレクターを使いました。
先月は、白いものにぶつかりそうになると止まるだけでした。
今月は、手を近づけたときの数値で判断するようにしました。
手を近づけたときの数値より大きいと左に曲がり、
小さいと右に曲がるようにしました。
それで、近づけたり、遠ざけたりすることによって、
思うように動かします。
Hくん、そうじゅうがなかなか上手です\(^o^)/
先月は、白いものにぶつかりそうになると止まるだけでした。
今月は、手を近づけたときの数値で判断するようにしました。
手を近づけたときの数値より大きいと左に曲がり、
小さいと右に曲がるようにしました。
それで、近づけたり、遠ざけたりすることによって、
思うように動かします。
Hくん、そうじゅうがなかなか上手です\(^o^)/


