



カップめんタイマーを作成する前に、
まず基礎として、ロータリーエンコーダの仕組みを学びます。
まず基礎として、ロータリーエンコーダの仕組みを学びます。
ロータリエンコーダとは、回転数・回転角度・回転位置を計測する
センサーのことです。
センサーのことです。
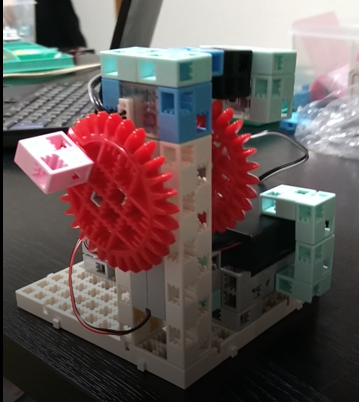
ロータリーエンコーダは、
赤外線フォトインタラプタとギアとを組み合わせて作成します。
赤外線フォトインタラプタは、2つの赤外線フォトリフレクタを
向かい合わせにして、作成しました。先月学びました。
今月もそれを使います。
赤外線フォトインタラプタとギアとを組み合わせて作成します。
赤外線フォトインタラプタは、2つの赤外線フォトリフレクタを
向かい合わせにして、作成しました。先月学びました。
今月もそれを使います。
赤外線フォトインタラプタにギアを組み合わせて、
ギアが回転している間に、赤外線が届いているかいないかを
赤外線フォトインタラプタの値で検知します。
そして、届いているとき、回転量を6度と計測し
届いていないときも、回転量を6度と計測します。
そして、回転量が360度になったところで
DCモーターの停止命令を出すプログラムにします。
ギアが回転している間に、赤外線が届いているかいないかを
赤外線フォトインタラプタの値で検知します。
そして、届いているとき、回転量を6度と計測し
届いていないときも、回転量を6度と計測します。
そして、回転量が360度になったところで
DCモーターの停止命令を出すプログラムにします。
赤外線フォトインタラプタのしきい値がきちんとしていないと、
正確に赤外線が届いているかどうか判断ができません。
ピッタリ360度でDCモーターを止めることができるでしょうか?
正確に赤外線が届いているかどうか判断ができません。
ピッタリ360度でDCモーターを止めることができるでしょうか?
Kくん、ぴったりでした\(^o^)/
さらに速度を速くしました。それもぴったりでした\(^o^)/
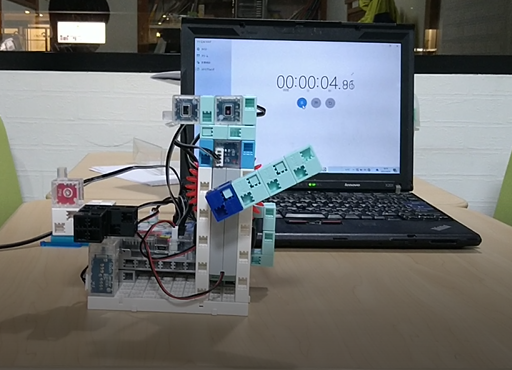
このロータリーエンコーダを使って、カップ麺タイマーを作りました。
あと30秒となったところからゆっくり回ります。
Kくんは、パソコンのタイマーを表示して、わかりやすくしました。
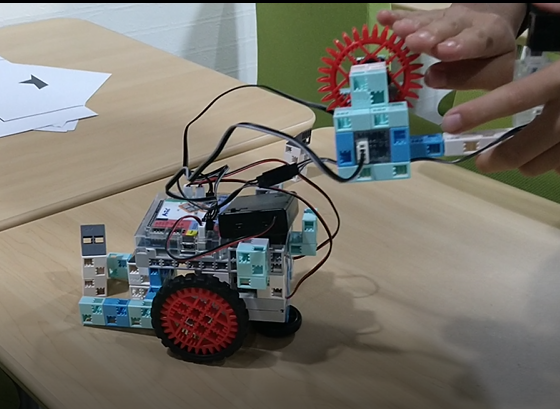
発展学習では、自動車型に変更して、
ロータリーエンコーダをコントローラーとして利用しました。
人がギアを回転させて、そのギヤの回転を計測して、
回転量に応じてDCモーターの速さを制御するプログラムにしました。
Kくんコントローラーを操作しながら、上手にブロックを集めました。
ロータリーエンコーダをコントローラーとして利用しました。
人がギアを回転させて、そのギヤの回転を計測して、
回転量に応じてDCモーターの速さを制御するプログラムにしました。
Kくんコントローラーを操作しながら、上手にブロックを集めました。


