



レベル3から7で学習してきたことを組み合わせてロボットを作りました。
今までの総復習のようです。
1.赤外線フォトレフレクターをつかって見つけたブロックを
アームロボットで運ぶ仕組み。
2.変数を使って、サーボモーターを1度ずつ角度を変えて制御する方法。
3.2種類のギアを組み合わせて、回転運動を直線運動に変える仕組み。
4.リストをつかって、複数の情報をまとめて記録する方法。
ここでは、センサーの感知範囲を広げるために、センサーを動かすという方法も
学びました。
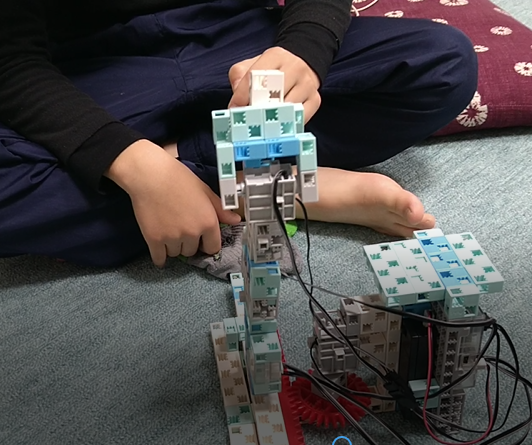
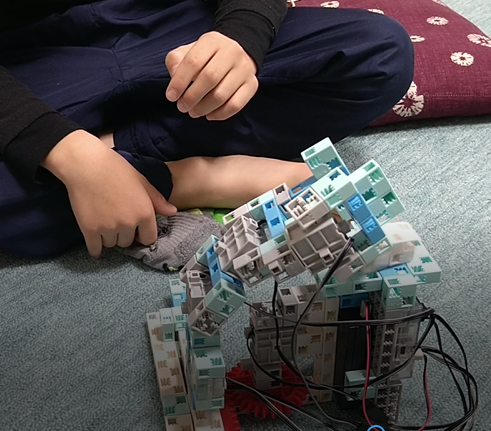
使うパーツも多いです。
組み立てにも時間がかかります。
Yくん、ブロックはうまくつかめましたが、台におくときに台から落ちてしまいました。
台を少し大きくして、うまくいきました。


